Los modelos diseñados para analizar el efecto de las distintas reglas de responsabilidad sobre la conducta humana distinguen la existencia de dos tipos de agentes: dañadores y víctimas. Se diferencian las situaciones en las que los individuos son extraños de aquellas en las que existe una vinculación contractual entre ellos. En todos los casos, se asume que los agentes toman decisiones guiados por la maximización de sus utilidades esperadas y se supone, en general, que son neutrales frente al riesgo.
Modelo de “causación unilateral” en donde lo relevante es sólo la precaución
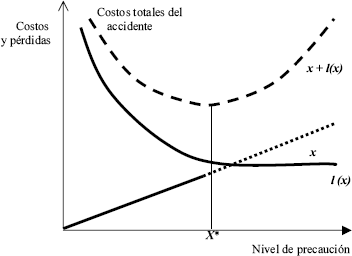
La versión más sencilla de este tipo de modelos corresponde al caso de daños de causación unilateral entre extraños en los cuales el nivel de actividad permanece constante y es el nivel de precaución el único determinante del riesgo. El problema que se plantea es encontrar el nivel de precaución que minimice el costo total del accidente, teniendo en cuenta que un aumento en el nivel de precaución reduce el riesgo del accidente e incrementa el costo de la precaución.
Formalmente:
Dados x: nivel de precaución del dañador, medido como el costo de tomar precaución, con x > 0; y l(x): pérdida esperada del accidente causado por un dañador que adoptó un nivel de precaución x, con l(x) ? 0; l´(x) 0.
La función objetivo es:
Min x + l(x)
La condición de primer orden establece que 1 = -l(x) de donde se obtiene x* que resulta ser el nivel óptimo de precaución. Esta condición expresa que el costo marginal de la precaución debe igualarse con el beneficio marginal expresando en términos de la reducción alcanzada en la pérdida esperada del accidente.
Gráficamente:
Seguidamente se considera la conducta del dañador bajo diferentes reglas de responsabilidad. Se supone que este agente busca minimizar su gasto esperado, es decir el costo del nivel de precaución que adopte más el costo esperado de la indemnización que debe afrontar si es responsable del hecho (su obligación esperada). Se consideran tres alternativas:
Sin responsabilidad: En este caso el dañador no debe responder por el daño causado. De esta manera, no tiene incentivos a adoptar ningún nivel de precaución, por lo que el valor de x que minimiza su costo es x = 0. El costo total del accidente será l(0), es decir el correspondiente a un nivel de precaución nulo y por lo tanto no será minimizado. Esta alternativa es ineficiente.
Con responsabilidad objetiva: Bajo esta regla el dañador es siempre responsable por el total de la pérdida causada, y debe entonces indemnizar siempre a la víctima. Su obligación esperada será l(x) y entonces su función objetivo coincidirá con la de bienestar social. Elegirá el nivel de precaución óptimo x*. la aplicación de esta regla conduce a una situación eficiente.
Con responsabilidad por culpa: Bajo esta regla el dañador responderá sí y sólo si el nivel de precaución adoptado es menor que un estándar preestablecido o due care
. Si el due care
representado por ? coincide con x*, el dañador elegirá x*. No elegirá x > x* debido a que sólo con x* elude el pago de la indemnización, y aumentaría su costo sin ningún beneficio adicional. De la misma manera tampoco elegirá x due care elegido coincide con el nivel socialmente óptimo.
Si bien las dos últimas alternativas conducen al óptimo social, difieren en la información necesaria para su aplicación en la forma de asignar el riesgo, en sus efectos distributivos y en los costos administrativos que generan. Además, si existen muchas dimensiones de precaución, en el caso de responsabilidad objetiva, el dañador tiene incentivos para elegir el nivel óptimo de la dimensión empleada en la definición del due care
.
Modelo de causación bilateral en donde lo relevante es sólo la precaución
Manteniendo la hipótesis de nivel de actividad constante, la bilateralidad implica, por definición, que tanto el dañador como la víctima pueden tomar precauciones para reducir el riesgo del accidente y por lo tanto, la función objetivo incorpora el costo de precaución de la víctima. El óptimo puede requerir1 que ambos agentes adopten algún nivel de precaución o que sólo el dañador o sólo la víctima o ninguno tomen precaución. Generalmente, en la mayoría de las situaciones reales suele ser deseable que ambos adopten algún nivel de precaución.
Con responsabilidad objetiva, el dañador tiene incentivos para adoptar el nivel de precaución óptimo, pero como la víctima será compensada, no tiene incentivo para tomar precaución. Con responsabilidad por culpa, el dañador2 tomará el nivel de precaución correspondiente al due care
para eludir la responsabilidad. Si el due care
coincide con el nivel de precaución óptimo; el sistema de responsabilidad subjetiva conducirá a un nivel eficiente. La víctima, a su vez, también adoptará el nivel de precaución óptimo porque al eludir el dañador la responsabilidad, ella no será compensada y deberá soportar el daño, por lo que tendrá incentivos para minimizarlo. En el sistema de responsabilidad objetiva, para que esta alternativa conduzca al óptimo, se deberá incluir algún elemento que genere el incentivo adecuado para que la víctima adopte el nivel de precaución eficiente. Así surgen sistemas3 donde se exime de la responsabilidad al dañador si se demuestra que la víctima actuó con negligencia.
Modelo de causación unilateral en donde los accidentes dependen de la precaución y del nivel de actividad
En los accidentes unilaterales en los que los costes del accidente dependen de la precaución y del nivel de actividad del causante, la regla de responsabilidad objetiva induce a resultados eficientes; mientras que la regla de responsabilidad por culpa, para ser eficiente, precisa que el nivel de diligencia se refiera tanto a la precaución como al nivel de actividad. Esta condición resulta muy difícil en la práctica y ello hace que la responsabilidad objetiva sea superior en muchas ocasiones.
Modelos de causación bilateral en donde los accidentes dependen de la precaución y del nivel de actividad
Cuando se incorpora el nivel de actividad, se supone que un incremento del mismo produce un aumento proporcional en las pérdidas esperadas, dado el nivel de precaución, y simultáneamente un aumento en la utilidad de los agentes. El objetivo es maximizar la utilidad de ambos agentes menos el costo de precaución del dañador y de la víctima y la pérdida esperada del accidente. No existe entonces, en este nuevo escenario, una regla de responsabilidad eficiente; si bien la regla de la culpa y de la responsabilidad objetiva con eximentes conducen a niveles óptimos de precaución, esta última incentiva a que la víctima adopte un nivel de actividad demasiado alto, mientras que la primera lleva a que sea el dañador el que emprenda un nivel de actividad demasiado alto. Esto podría solucionarse incluyendo en el due care
el nivel de actividad en los sistemas con culpa.
Si se considera que los dañadores son empresas y las víctimas son extraños, se mantienen en general los argumentos anteriores y se incorpora como elemento diferente que el tipo de responsabilidad aplicada afecta al precio del bien o servicio, ya que el precio incluye el costo esperado del accidente. Por lo que el precio será mayor bajo la responsabilidad objetiva que bajo responsabilidad por culpa.
Considerando que un aumento en el nivel de actividad de ambos aumenta sus utilidades y simultáneamente provoca un incremento proporcional en las pérdidas esperadas. El objetivo es maximizar una función de bienestar social definida como la suma de las utilidades netas de los dañadores y las víctimas afectadas por el daño.
Formalmente:
s = nivel de actividad del dañador, con s ? 0.
x = nivel de precaución del dañador por unidad de actividad realizada, medido como el costo de tomar precaución, con x ? 0.
u(s) = utilidad del dañador, derivada de realizar una actividad relacionada con el daño que puede causar, con u(s) > 0, u´(s) > 0, u´´(s) 0, v´(t) BS = u(s) + v(t) – [sx + ty + stl(x,y)]
Las condiciones de primer orden resultan:
l = -tlx(x,y)
l = -sly(x,y)
u´(s) =x + tl(x,y)
v´(t) = y + sl(x,y)
Las dos primeras ecuaciones expresan que debe igualarse el costo marginal de la precaución con el beneficio marginal de un aumento en el nivel de precaución de cada uno de los agentes dado el nivel adoptado por el otro, expresado en términos de la disminución en la pérdida esperada. Las dos últimas ecuaciones establecen que las utilidades marginales derivadas de un incremento en el nivel de actividad de los agentes deben igualarse con el costo de incrementar el nivel de actividad. Resolviendo el sistema se obtienen los valores óptimos de precaución y actividad de cada uno de los agentes (x*, y*, s*, t*).
El tratamiento de los fenómenos dañosos abarca un amplio espectro de situaciones, con diversas particularidades. El sector de riesgos del trabajo, es un campo especial con características propias. Se trata de un área que engloba a víctimas y dañadores. Por otra parte, los sujetos están vinculados por una relación contractual previa y es evidente que ambas partes pueden influir en el riesgo. El planteo teórico de los riesgos del trabajo, se formula de igual modo que en las restantes situaciones de daños, con independencia del sistema de control de riesgos que se intente establecer.
Autor: María Delia Irastorza
Como citar este texto:
Anonimo (22 de Jun de 2010). "Los Modelos". [en linea]
Dirección URL: https://www.econlink.com.ar/modelos-responsabilidad-reglas-conducta (Consultado el 14 de Mayo de 2021)